
- Ces patches correspondent à la carte 8 Servomoteurs configurée en mode 3500 pas.
- Documentation de la carte.
- Ensemble des patches 3500 pas disponibles actuellement (Max, Isadora, PD).
- Patches Max 6 pour les 8 Servos 3500 Pas.
Patches de test
 Abstraction Max : Piloter 8 Servomoteurs en 3500 pas de résolution
Abstraction Max : Piloter 8 Servomoteurs en 3500 pas de résolution
La carte doit être configurée en 3500 pas avec l’inter 1 du groupe A On.
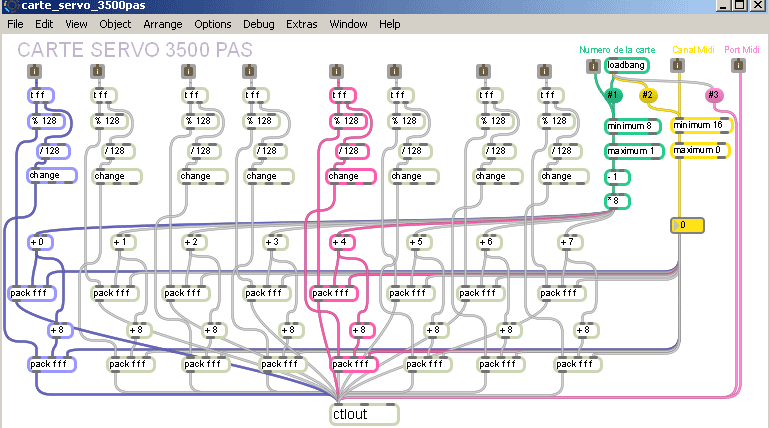
Patch carte_servo3500pas.maxpat
Pour voir le patch en grand, cliquez sur l’aperçu.
Existe aussi pour :
Ce patch permet d’envoyer des commandes en Midi vers la carte 8 Servo. Il est utilisé dans le patch suivant.
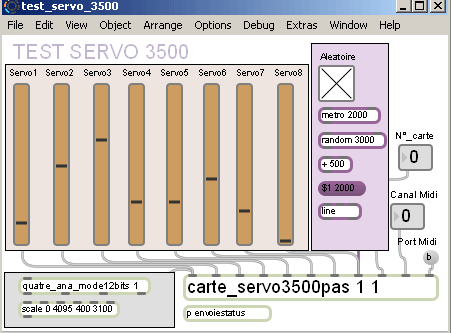
 Patch Max : Test des servomoteurs en 3500 pas
Patch Max : Test des servomoteurs en 3500 pas
Existe aussi pour :
L’objet "carte_servo_3500pas" est une abstraction, présentée dans le Patch précédent. Les huit premières entrées servent à piloter manuellement les 8 servomoteurs, la neuvième permet de choisir le numéro de la carte, la dixième est pour le choix du canal Midi et la dernière permet de choisir le port Midi (interface Midi-USB par exemple). Ces paramètres peuvent se mettre en arguments.
Les valeurs des ascenseurs sont définies entre 500 et 3100, ce qui est le plus confortable pour les moteurs.
L’objet "quatre_ana_mode12bits" permet de relier directement la variation d’un capteur (ici le capteur branché sur l’entrée n°1) au mouvement d’un servomoteur.
Pour cet exemple, le traitement des valeurs est assez grossier mais permet
d’utiliser la gamme de mouvement du servomoteur.
La chaîne d’objets câblée sur le huitième servo est un exemple de comportement aléatoire graduel lent.
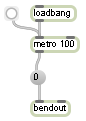
![]() Le sous-patch "Running_status" permet de s’affranchir de l’éventuel phénomène de running status lié au protocole Midi. Une page dédiée à ce sujet : running status. Le patch est détaillé ici.
Le sous-patch "Running_status" permet de s’affranchir de l’éventuel phénomène de running status lié au protocole Midi. Une page dédiée à ce sujet : running status. Le patch est détaillé ici.
Pour un exemple de propagation de mouvement, voir la page Max 4.