
- Conseils >
- Servomoteurmoteur
Servomoteur

Servo-moteur avec différentes formes de têtes pour adapter
des objets sur l'axe.
Présentation
Les servomoteurs permettent de déplacer un bras, sur lequel est fixé un objet, jusqu'à une certaine position (ou angle de rotation), puis à maintenir solidement cette position. Le terme même de servomoteur signifie qu'il s'agit d'un moteur asservi, obéissant à une commande externe.
Un servomoteur est un ensemble complet de mécanique et d'électronique, qui contient :
- un moteur à courant continu (CC) souvent de petite taille ;
- une carte électronique d'asservissement ;
- un réducteur de vitesse ;
- un potentiomètre, pour contrôler la position de l'axe du moteur ;
- un axe dépassant hors du boîtier avec différents
bras ou roues de fixation.
Utilisation
Les servomoteurs se trouvent fréquemment dans les magasins de modélisme ou dans les catalogues d'électronique. Sur des maquettes comme en robotique, ils sont utilisés pour positionner, faire pivoter, rentrer/sortir des éléments d'aiguillage, trains d'atterrissage, onglets, signalisations, ...
En art, ils peuvent être utilisés dans des sculptures interactives ou automatiques, dans des installations lumineuses ou cybernétique ou dans des instruments de musiques nouveaux. Exemples d'utilisations possibles sur la page Module de Commande en Midi de 8 Servomoteurs.
Le servomoteur est aussi utilisé pour obtenir le noir complet lors d'une projection. En effet, la plupart des video projecteurs diffusent une luminosité résiduelle même lorsque l'image envoyée est totalement noire. Pendant une partie d'un spectacle par exemple, il est donc parfois utile de masquer le faisceau du videoprojecteur sans cependant l'éteindre. Un cache manipulé par un servomoteur permet alors d'obturer complètement la projection ou de la laisser passer, voire de faire des effets d'ombres
Fonctionnement
Un servomoteur se pilote par l'intermédiaire d'un câble à trois fils. Ce câble permet à la fois de l'alimenter et de lui transmettre des consignes de position par le fil de signal.
Contrairement à un moteur CC simple, qui peut être piloté par des variations de tension ou par allumage/extinction, le servomoteur réagit en fonction d'une impulsion de durée variable. C'est la durée de ce signal qui détermine la rotation de l'axe donc la position de l'objet fixé dessus. L'impulsion détermine la position en absolu, pas en relatif : une durée précise correspond à une position précise de l'axe, toujours la même. Le signal doit être répété régulièrement (toutes les 20 ms).
Ces caractéristiques expliquent qu'il faille une électronique complexe pour piloter un servo-moteur, et que cette electronique lui soit dédiée.
Pour le rôle du potentiomètre contenu dans le servomoteur, voir la page Faradyi. Le potentiomètre est utilisé comme capteur interne au servomoteur. Le moteur tourne, l'axe du moteur change de position, la résistance qui découle du potentiomètre dépend de cette position, le système d'asservissemnt connaît la position de l'axe et contrôle le mouvement et l'arrêt du moteur pour que cette position en arrive à correspondre à l'impulsion qu'il a reçue.
Variété
Il existe plusieurs qualités et plusieurs types de servomoteurs. Leur coût est très variable selon la qualité du moteur. Les exemples que nous détaillons ici montrent des servomoteurs alimentés en tensions continue et de relativement petite taille, communs dans l'univers du modélisme. Il en existe de plus gros et puissants dans les applications industrielles.
Comme pour tous les moteurs, avant d'acheter un modèle il vaut mieux estimer le couple et la puissance nécessaire. Si le servomoteur est sous-dimensionné, il ne résistera pas à l'effort demandé ; s'il est trop sur-dimensionné, l'installation fonctionnera mais avec un coût plus élevé que nécessaire.
Les plus courants et les moins chers ont une course limitée à 90° ou 120°. Un modèle de base a par exemple pour dimensions 40 x 20 x 36 mm, il peut lever 3kg/cm (voir définition du couple) et il émet un petit bruit quand il tourne. Il existe aussi des servomoteurs qui font 180° ou même à rotation continue.
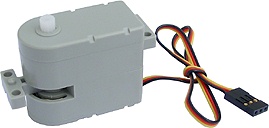
Les servo-moteurs "SM-V001" sont plus modulables que les servo de base : ils possèdent une sortie transversale qui permet de les fixer les uns aux autres pour les cascader, permettant ainsi facilement des mouvements complexes. Les positions possibles vont de -90° à +90° (course de 180°, donc). Ils permmettent de soulever 3 kg/cm.
D'autres servomoteurs se distinguent par leur taille plus réduite, par exemple le modèle "HT-3200" a pour dimensions 29 x 13,5 x 29 mm.
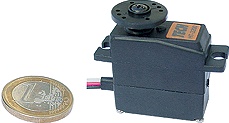
La puissance change aussi selon les modèles : le "S3802" par exemple a un couple de 11 kg/cm et ses pignons en métal sont de meilleure qualité. Il en existe de très puissants avec un couple de 40 kg/cm. Ils sont plus gros mais très robustes.
Certains modèles sont silencieux ; les servo-treuils font plusieurs tours ; il existe des servo qui tournent en continu ; il existe même des servomoteurs analogiques dont la commande est différente de ceux décrits ci-dessus.
Il est enfin possible de modifier des servos pour qu'ils servent à faire tourner quelque chose plutôt qu'à maintenir des positions, seulement ce n'est généralement pas très intéressant en coût (pour le même prix on peut avoir un ou deux moteurs CC et un réducteur !) et on risque de ne plus pouvoir récupérer le fonctionnement normal du servo-moteur.
Alimentation électrique
Il faut alimenter un servomoteur en restant dans la gamme de tension spécifiée dans la documentation du contructeur. Si la tension est trop faible, le servo ne fonctionnera pas, si la tension est trop forte, il sera détérioré.
Les servomoteurs ont besoin d'une alimentation régulée, en tension continue et fournissant assez de courant. Pour les servos fonctionnant en 5V, un bloc d'alimentation à découpage pour ordinateur fournit une alimentation correcte.