This sensor uses the doppler shift effect to produce velocity data about objects or people moving within its observation range.
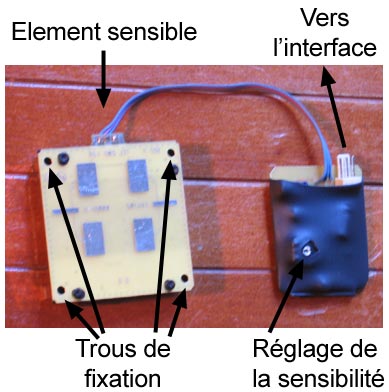
Complete sensor : sensitive module + adjustment electronic components
The 3 pin connector of this sensor lets one plugg an interface like our analog to midi converters such as our « 8 analogiques » (8 analog inputs)
Range : 5 to 20 m depending on the size and type of moving obstacles
Can be hidden behind a non conductive material such as wood, stone, paper...
Module dimensions : 54 mm 54 mm x 14,5 mm.
Power consumption : 40 mA
Our sensor is linked to a calibration electronic device. This small card has uses :
- amplifying the signal, giving it a full scale ( values from 0 to maximum of whichever protocol is used)
- it recenters and refocuses the signal
- the adjustment potentiometers make it adaptable to different applications
The sensitive module has 2 holes that lets one easily secure it onto a mount, facing the observation area.
The sensitive part is on the yellow-greenish side, the 4 metallic rectangles must remain uncovered. The silver side is the back of the sensor.
The electronic card is separate in order to not get in the way when fastening the module, and for the sensitive part to remain small in size. The card can be stuck behind the sensitive module, or completely separate behind a surface (as long as it is still linked by wires to the sensitive module).
Speed sensor – Doppler radar at Interface-Z
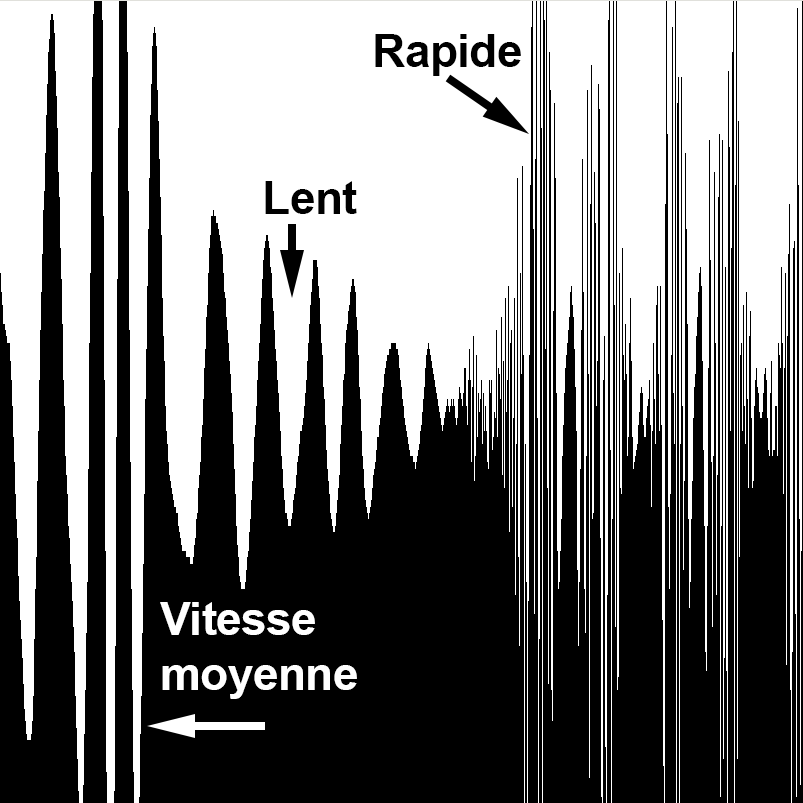
Data returned by the sensor over time.
A wave, wether it is a light, sound or radio wave, is particularly defined by its frequency. The Doppler effect is the change in frequency of a wave caused by the movement of it's emitter and/or its receiver.
When the wave emitter and its receiver (eyes, ears, an antenna,...) are both immobile to one another, the emitted and received frequencies are identical.
When the receiver or the emitter are moving, the frequency perceived by the receiver is different to the one sent by the emitter. If the distance between the two decreases, the perceived frequency increases. The wave fronts are regularly emitted, but if the receiver is approaching it perceives these wave fronts faster. Alternatively, if distance between the emitter and the receiver increases, each wave front needs more time to get to the receiver, which decreases the perceived frequency.
For a light wave, this discrepancy translates into color variations.
For a sound wave, it is perceived as a change in pitch.
A commonly used example used to explain the Doppler effect is that of a car siren heard by a standing pedestrian : when the car gets closer, the pitch of the siren's sound is perceived higher that what is being emitted by the car, the frequency is experienced as increasing. When the car is stopped at a red light, the siren's sound is heard the same from the car as the pedestrian, the pitch is not altered, they perceive an identical frequency. Once the car is moving away, the siren sound is perceived lower by the pedestrian, the frequency is experienced as decreasing.
The discrepancy of the emitted and received frequency also depends on the speed of the movement causing it. The higher the speed, the greater the difference in emitted and perceived frequency.
At rest, when nothing is moving in front of the sensor, the returned value is in the middle of the range (50% of whatever data range one is using. In Midi protocol, this would be roughly around 63 for example). When detecting movement, the returned values move away from this rest value, either above or below it.
Data returned by the sensor over time
The frequency of the acquired vibration is proportional to the speed of the object (or the person). To obtain the speed, one must analyze the frequency of the value peaks.
The formulas are :

f (Hz) : frequency obtained by analyzing the data returned by the sensor, between 3 and 80 Hz.
v (m/s) : speed of the person or object moving in front of the sensor.
c (m/s) : speed of light, 3.10(8) m/s.
Fo (Hz) : sensor frequency = 9,9 GHz.
The third formula is used to determine the movement speed of an object or person in front of the sensor. This sensor measures speeds within the scale of walking speed.
Coding examples that implement this principle are available in our Programming section.

Data sheet
Download
You might also like