





These products measure distance and proximity. Initially the sensitive modules had a limited range of about 80 cm, justifying the notion of proximity rather than distance. Since then, the new modules that appeared were able to observe obstacles much further away, and the available ranges keep growing.
By extrapolating these notions, it can also be used for detecting passage, presence (even if the subject isn't moving), and speed within its observation axis.
One can deduce movements that approach or move axay from the sensor within its axis.
By placing two sensors in parallel one can create a detection barrier that can detect passage in one way or another, in order to count visitors coming in or going out of an exhibition space for example.
Please take care to not forget the extension cords.
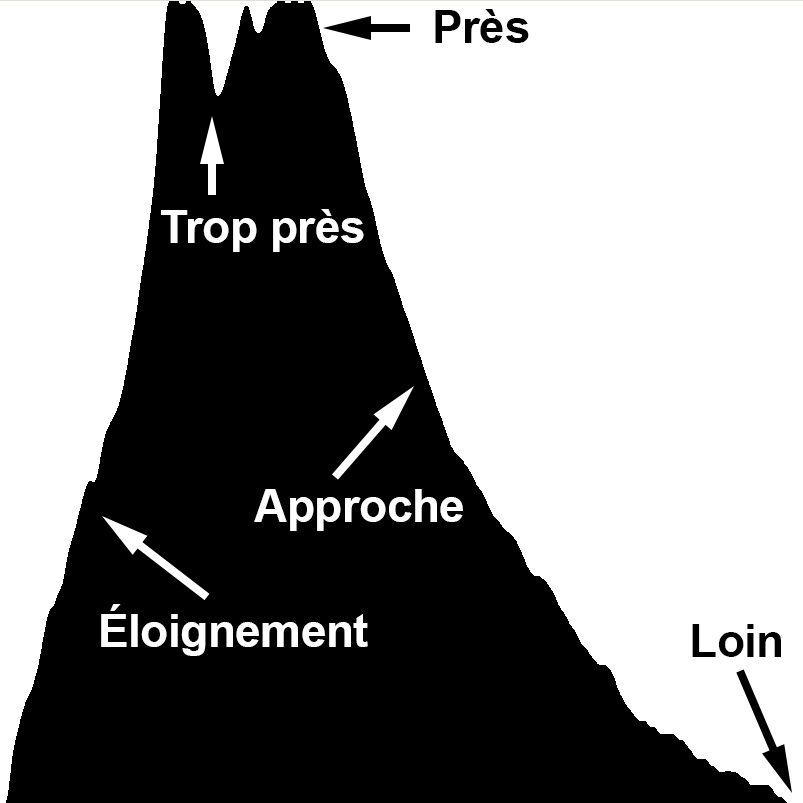
Data returned by the sensor, here shown over time
Proximity sensors are also known as optical triangulation distance sensors, or rangefinding telemeters. They work by using infrared light (invisible frequencies that remain close to the visible specter).
It is an active sensor, that emits a ray of invisible light at regular intervals. If an obstacle is near enough, this ray is reflected back towards the sensor. In turn, it measures the reflection angle of this light ray on the receiver.
To summarize :
The analog versions send a precise and gradual measurement, that progresses from 0 at the start of the detection treshold, to the maximum value (127 in standard Midi, 4095 in extended Midi) at the limit of their detection range limit : 4 to 30 cm, 10 to 80 cm, 19 to150 cm or 1 to 5,5 m.
If it measures something closer than its range threshold, (4cm, 10 cm, 19cm or 1m depending on the version) the data folds.
All or nothing versions have an integrated threshold. They are simple to use but their detection range is not adjustable, whereas an analog sensor can be used with a detection program in which one can determine a threshold wherever one wants. This means the detection distance is fixed for this version.
The distance measurement is not linear (unlike an ultrasonic rangefinder) : the sensor is less sensitive to far away obstacles, when at the egde of its range limit, and very sensitive when measuring something closeby. Its resolution is much finer up close.
Basically, the returned value is precise and can be reproduced, but is not directly proportional to the distance.
If one needs to know the exact distance measure, and not just the notion of approach, one can linearize the data to re-establish the distance in cm with a program. To process the data easily we offer various interfaces to transform the sensor data into protocols that can be exploited on a computer, such as Midi or OSC.

The graph above shows the data returned by various analog proximity sensors : the values have been converted to a Midi protocol going from 0 to 127, and are shown in comparison to the distance in cm (depending on each sensor module).
We can see that there is far more data variation, hence a higher resolution, for middle to close distances (vertical gray line), compared to the distances further away.
Another specific feature of these sensors is the data folding : the measurement range begins at a short distance from the sensor module, not immediately from the module. This distance is proportional between the different versions, and is due to the geometry of the sensor module.
Between this short distance and the sensor itself, the data decreases almost linearly. This phenomenon is generally exploitable on short-range models (40, 80, 150 cm), but not reasonably so on the giant proximity sensor.
These sensors are also very directive : the observation angle is thin, less than 10°. One must be exactly in front of the sensor to be detected, this must be kept in mind when designing the set up of an installation. This can be useful if you want the detection to graze by a surface or a rod.
They can be set up along a wall.
The characteristics described here apply to sensors usually used directly, accessible, in contact with air. However these sensors do work behind glass windows and even through water (Not IN water, but it can be placed behind the glass of a aquarium). It must be stuck directly against these surfaces.
These sensors are impervious to visible light : sun, lighting, LED lamps, spotlights...
There isn't any interference from temperature or length of use either.
The nature of the reflected obstacle can slightly affect the measurement : a black knit in fuzzy mohair whool absorbs more light-waves than a smooth white T-shirt, but it is perceived. The reflectiveness of the obstacle doesn't affect the measurement by much, except in the precise case of mirrors.
These sensors can create their own interferences if placed in front of a mirror or a very shiny and reflective surface. It makes sense, since the infrared ray it emits is reflected back towards the the sensor even if the obstacle is out of range, hence disrupting the measurement.
For similar reasons, one shouldn't place two of these sensors opposite and facing each other, else each receives the infrared light of the other and thinks it's measuring an obstacle.
Observation : the proximity sensors can vaguely function in 3,3V supply, but work distinctly less well than in 5V power supply.
Just like any sensor that returns gradual information, the data can be used in many different ways :
The response being non-linear, to obtain the true distance of the obstacle and not just a notion of how it approaches/moves away, one must linearize the data with a function that transforms the response curve, or more precisely by a series of calculations established by calibration.
Other applicable processing : variation direction, memorizing an approach distance, detecting passage direction, counting passage, measuring approach speed...
These various processes are detailed in the book : « Traitements de données de capteurs en Art - Programmation temps réel pour l'art interactif » or « Sensor data processing in Art – Realtime programming for interactive art ».
Example of linearisation :
Response curve : signal intensity depending on the inverse of the distance. It's a straight line.
The applications for the proximity sensor in contemporary art are very versatile. It can be used to analyse movement in general of a spectator in an installation, or can end up in a control interface for a musician. It can monitor a scene or a water bassin.
Installations : effects on playback speed, lighting, sound volume, counting spectators.
Museography : triggering light plays, music, in an interactive device, or installation.
Window displays : interactivity with people passing in the street, attracting the eye with interactive animation.
Installation examples are listed in the various proximity sensor's pages and in the « Creations » section.
You might also like
++ Distance / IR Proximity - Information