






C'est un capteur de proximité et de distance. A l'origine les modules ne permettaient de mesurer qu'une courte portée, 80 cm au maximum, d'où la notion de proximité. Ensuite de nouveaux modules sont apparus et permettent de nos jours des distances beaucoup plus grandes.
Par extrapolation de ces notions, c'est aussi un détecteur de passage, un détecteur de présence, y compris de présence immobile, et un capteur de vitesse dans un axe.
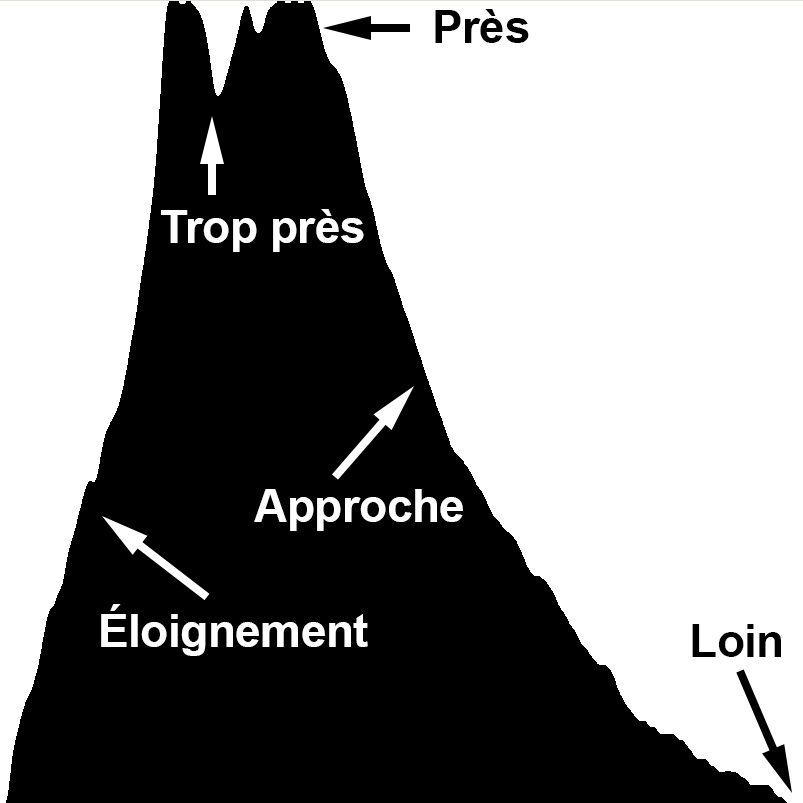
Nous pouvons en déduire une approche ou un éloignement dans un axe.
En mettre deux en parallèle permet de créer un détecteur de sens de passage, ce qui conduit à pouvoir compter des entrées ou des sorties de visiteurs.
Attention, n'oubliez pas les rallonges.
Données envoyées par le capteur, ici affichées au cours du temps
Les proximètres sont aussi appelés capteurs de distance, ou télémètres, à triangulation optique. Leur principe de fonctionnement utilise de la lumière infrarouge (fréquence invisible mais proche du perceptible).
Il s'agit d'un capteur actif, qui envoie avec un émetteur un éclair de lumière invisible à rythme régulier. Si un obstacle est à sa portée, cet éclair est reflété et repart vers le capteur. Il mesure en retour l'angle de réflexion du rayon lumineux sur le récepteur.
En résumé :

Les versions analogiques envoient une mesure précise graduelle, progressive allant
Les versions tout ou rien disposent d'un seuil intégré. Ils sont simples à utiliser mais leur distance de détection n'est pas ajustable, alors qu'un capteur analogique peut être associé à un seuil dans un programme en fonction de la distance de déclenchement réellement souhaitée.
La mesure de distance n'est pas linéaire (contrairement à un télémètre à ultrason) : le capteur est peu sensible de loin, en bout de portée, et très sensible de près. La résolution est beaucoup plus fine de près que de loin.
Concrètement, la valeur obtenue est certes précise et reproductible mais pas proportionnelle directement avec la distance.
S'il y a besoin de connaître la mesure exacte de distance et non seulement la notion d'approche, il est possible de linéariser les données pour reconsituer la distance en cm à partir des données Midi (ou autre protocole).

Le graphe ci-dessus montre la réponse des divers proximètres analogiques : la valeur en données Midi (de 0 à 127) est notée en fonction de la distance en cm (dépendant de chaque module). Nous voyons ainsi qu'il y a beaucoup plus de variation de valeurs, donc une plus grande sensibilité, dans la moitié de la distance (trait gris vertical) proche du capteur que dans la moitié lointaine.
Une autre caractéristique spécifique de ces capteurs est le phénomène de repliement des données : le maximum des valeur est atteint à une certaine distance du capteur, pas à son contact. Cette distance est proportionnelle entre les divers modèles et est intrinsèquement liée à la géométrie du capteur.
Entre cette distance et le capteur lui-même, les données diminuent de façon quasi linéaire. Ce phénomène est donc globalement exploitable sur les modèles courte portée (40, 80, 150 cm) mais pas raisonnablement sur le proxi géant.
Ces capteurs sont de plus très directifs : leur angle de surveillance est faible, moins de 10°. Il faut donc être exactement en face pour être détecté, ce qui implique une scénographie adaptée. L'avantage est cependant qu'il peuvent raser une surface ou une tige.
Ils peuvent être disposés le long d'un mur.
Les caractéristiques décrites ici concernent des capteurs utilisés usuellement en direct, accessibles, dans l'air. Ces capteurs fonctionnent cependant aussi derrière une vitre et même à travers l'eau (pas dans l'eau : derrière la paroi d'un aquarium). Ils doivent être plaqués contre la paroi.
Ces capteurs sont indépendants de la lumière visible : soleil, éclairages, lampes LEDs, projecteurs... Ils y sont insensibles.
Il n'y a pas non plus d'interférence par la température ou la durée de fonctionnement.
La nature de l'obstacle réfléchit peut légèrement affecter la mesure : un tricot noir en mohair pelucheux est plus absorbant pour les ondes lumineuses qu'un t-shirt blanc lisse, néanmoins il est perçu. La réflectivité de l'obstacle influence assez peu la mesure, sauf dans le cas précis des miroirs.
Ces capteurs sont sujets à de l'autoparasitage s'ils sont placés face à un miroir ou à une surface très brillante et réfléchissante. C'est logique, les éclairs infrarouges envoyés sont réfléchis vers le capteur même si la surface est hors de portée, perturbant les mesures.
De même il ne faut pas placer deux capteurs directement l'un face à l'autre, sinon chacun voit la lumière de l'autre et croit que c'est une mesure d'obstacle.
Remarque : les proximètres fonctionnent vaguement aussi en 3,3 V mais nettement moins bien qu'en 5 V.
Comme pour tout capteur donnant des informations graduelles, les données peuvent être mise en œuvre de deux façons différentes :
La réponse étant non linéaire, pour obtenir la distance réelle et non juste la notion d'approche/éloignement, il faut linéariser les données avec une fonction de transformation de courbe de réponse ou bien plus précisément par un ensemble de calculs établis par calibration.
Autres traitements applicables : sens de variation, mémorisation d'une distance d'approche, détection de sens de passage, comptage de passages, vitesse d'approche...
Ces divers traitements sont détaillés dans le livre : Traitements de données de capteurs en Art - Programmation temps réel pour l'art interactif.
Exemple de linéarisation :
Courbe de réponse : intensité du signal en fonction de l'inverse de la distance. C'est une droite.
Les applications du proximètre en art contemporain sont très versatiles. Il peut servir à analyser le mouvement général d'un spectateur dans une installation, ou bien se retrouver dans une interface de contrôle pour un musicien. Il peut surveiller une scène ou encore un bassin d'eau.
Installations : effet sur une vitesse de lecture, une luminosité, un volume, comptage de spectateurs.
Muséographie : déclenchements de musique et de jeux de lumières dans un dispositif interactif.
Vitrine : interactivité avec des visteurs dans la rue, attraction du regard vers une animation interactive.
Des exemples d'installations sont cités dans les pages des divers modèles et dans la section Réalisations.
La page d'informations générales vous donnera beaucoup de détails sur le fonctionnement des proxis :
Retrouvez les différentes déclinaisons de proximètres disponibles à l'achat :
Vous aimerez aussi
++ Distance / Proximité IR - Informations











